








 Hagisonic Stargazer
Hagisonic Stargazer

 References
References
Video Cameras
References
-
OpenCV - used extensively to interface with the video streams.
Overview
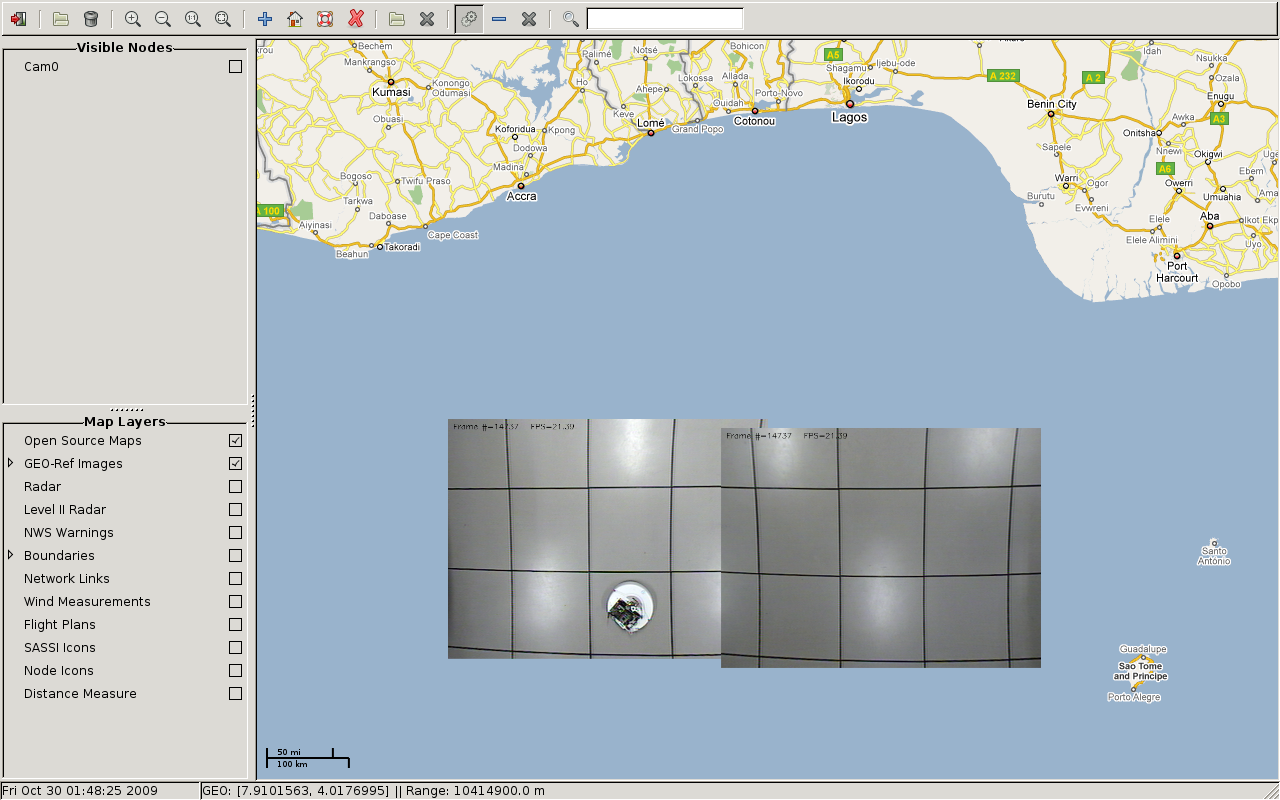
The video system employed in the NetUAS system displays the real-time video overlayed on the map. The video stream is placed in the correct geographic position. Note that in the figure below the cameras are placed at (0,0) which on Earth is just off the East coast of Africa. Also note that there are 2 images that are combined from seperate cameras. The algorithms written in the NetUAS automatically rectifies the images. You can see how the lines on the floor line up pretty well.
The follwing video demonstrates this algorithm utlizing one of the Roomba's. Note how there is little error when the Roomba transfers from one Peusdo-light to the next.
Hardware
For this system the Topica TP-550TVL-DN video cameras were used. The video capture was done by the Security Eyes Multi-Port Surveillance Solution.

